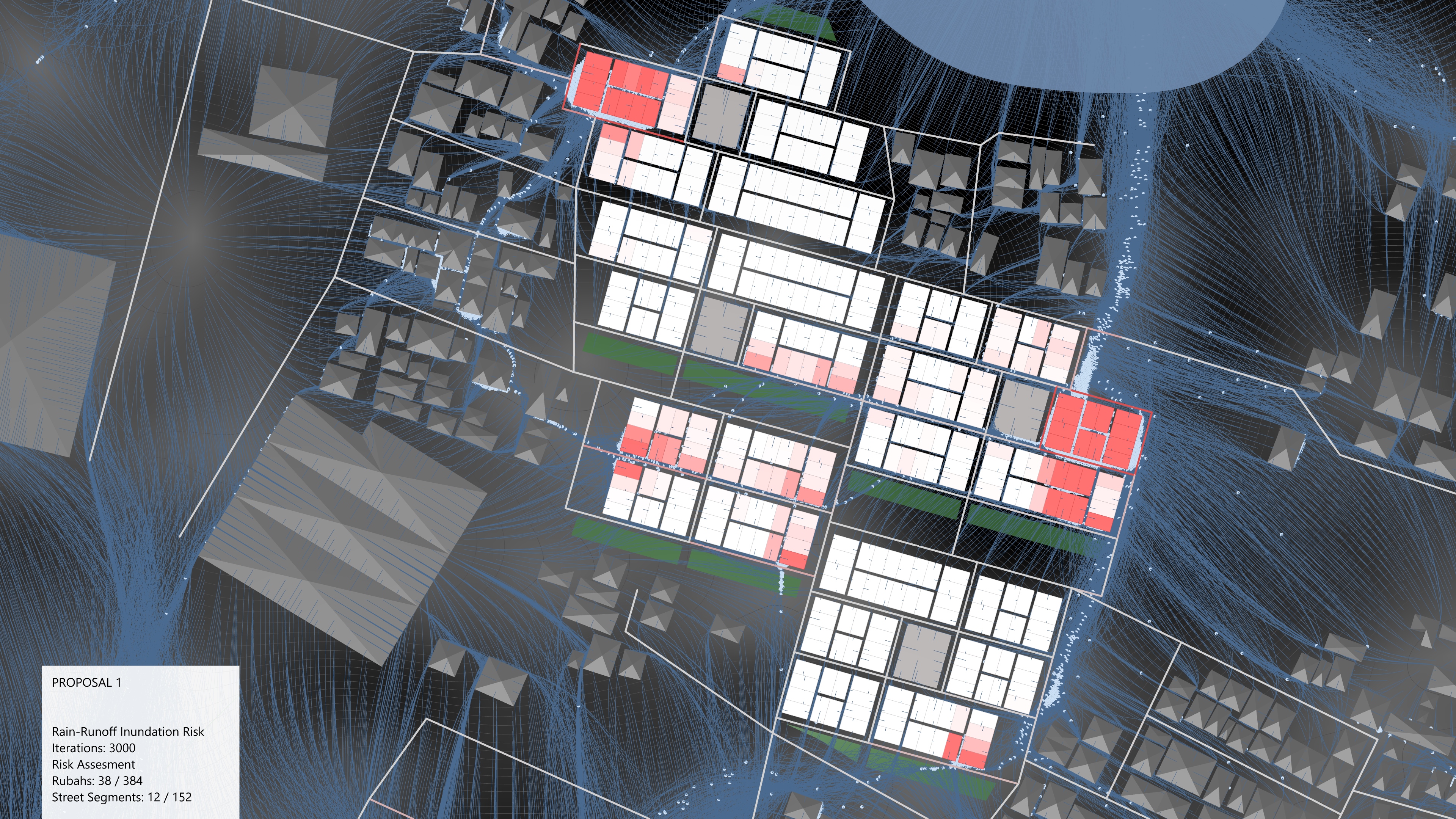
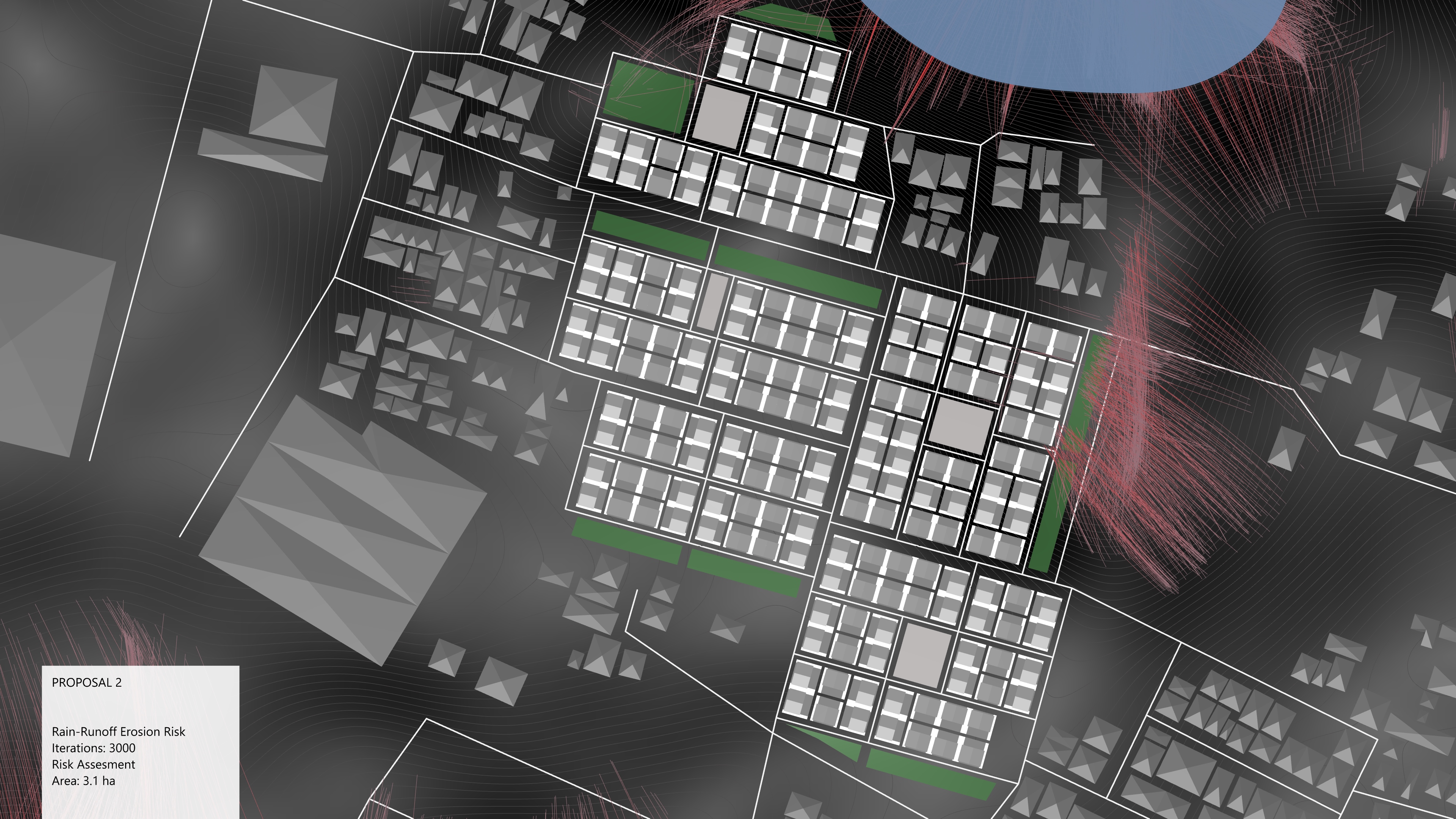
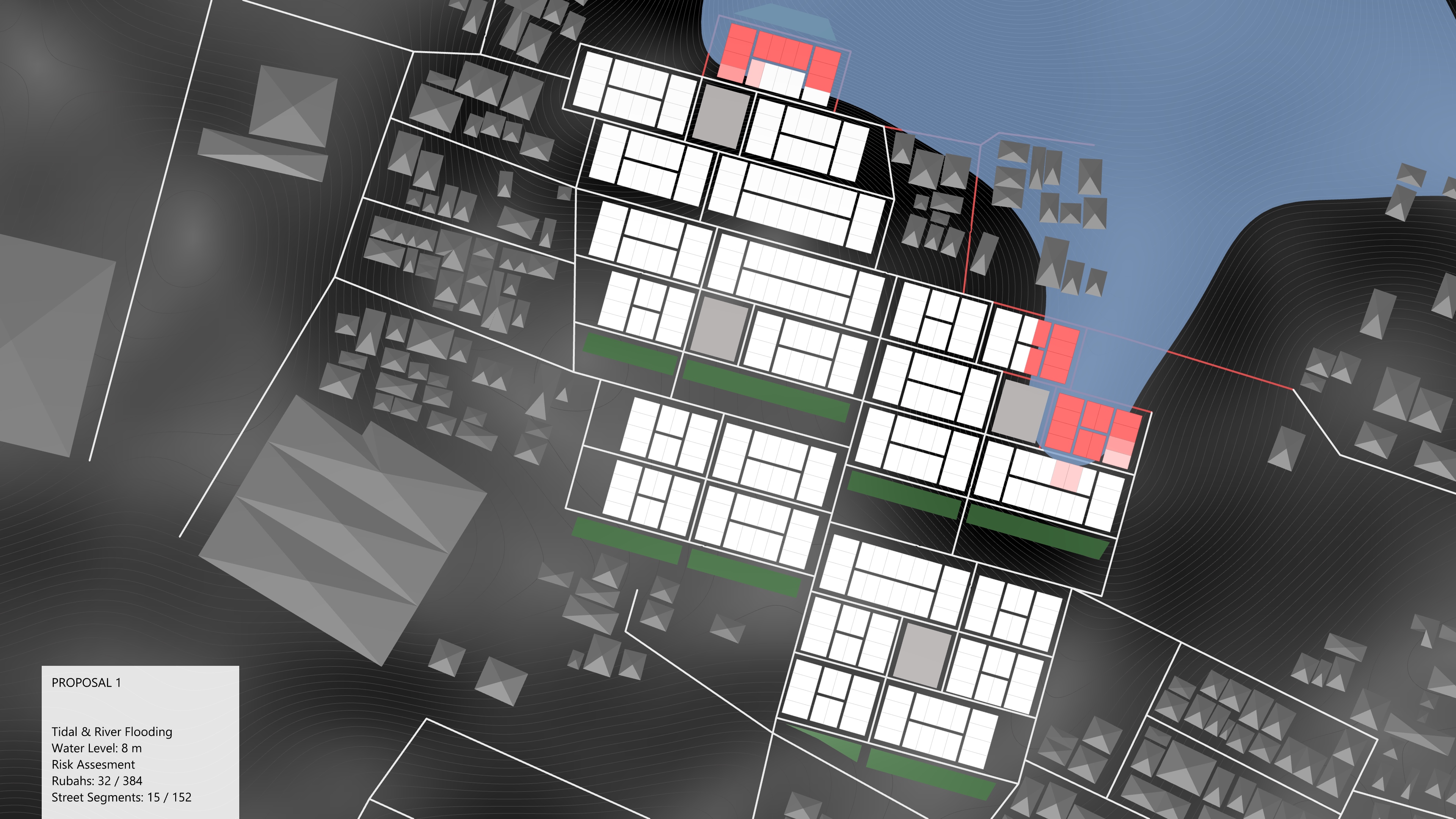
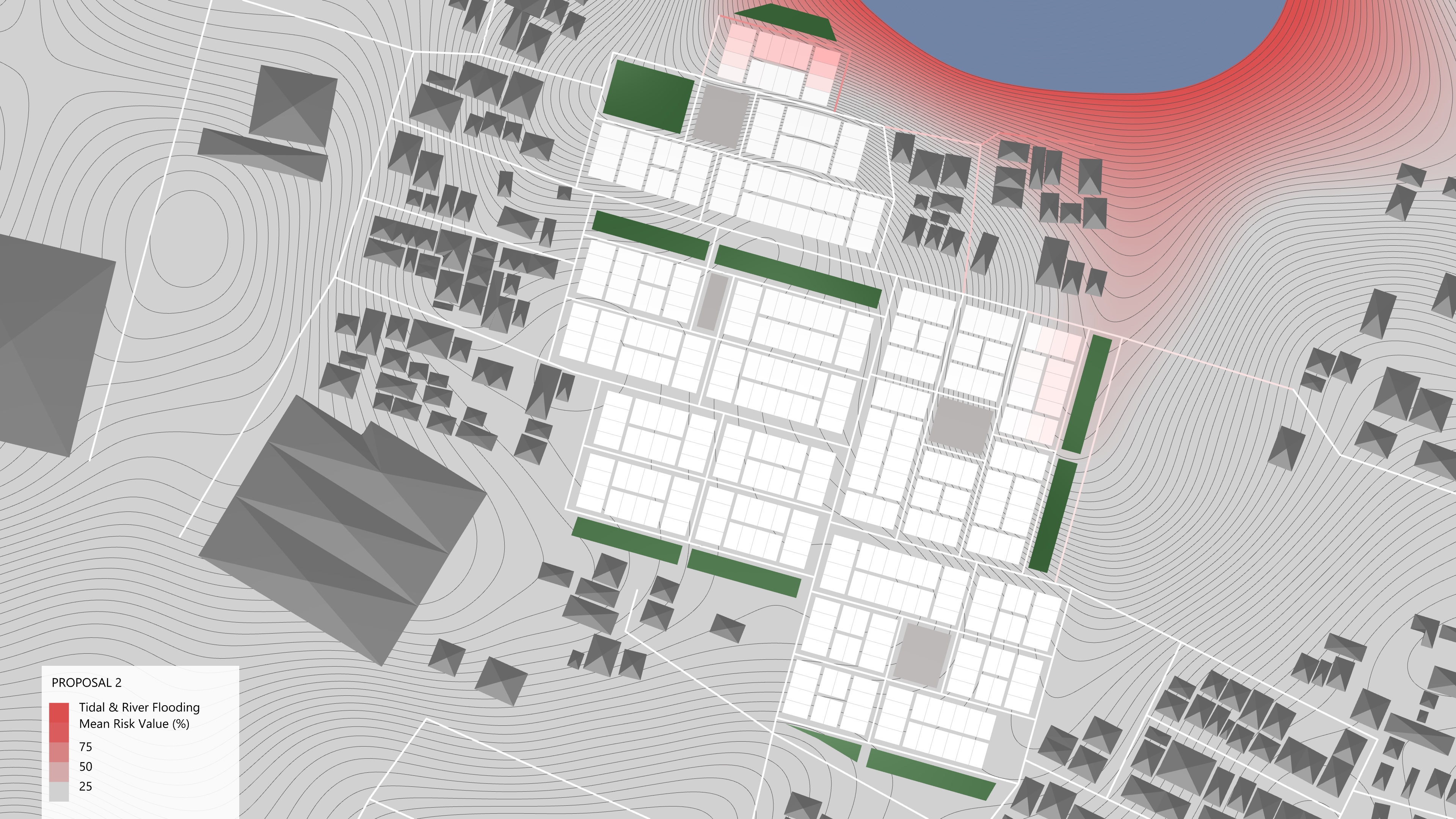
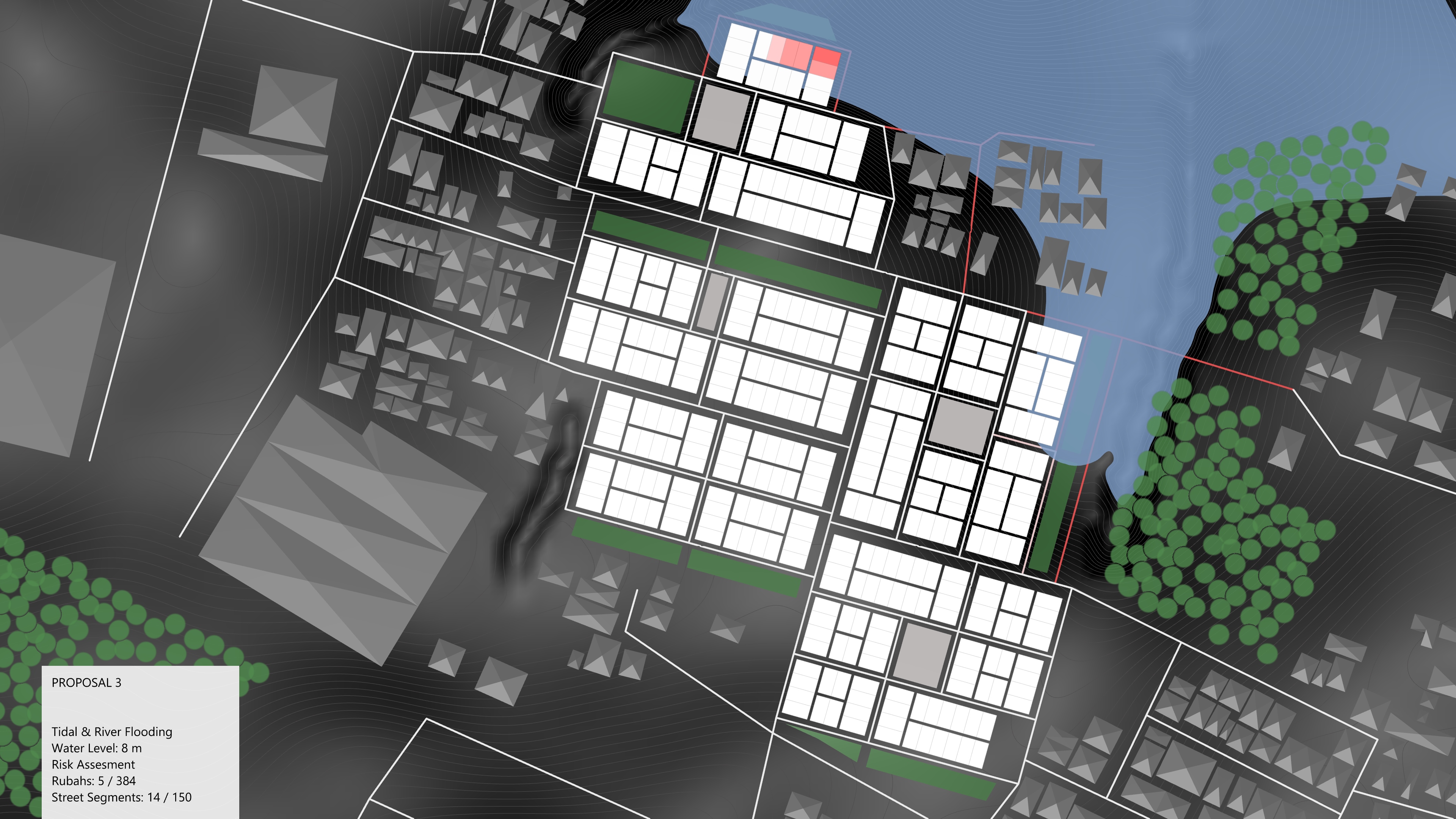
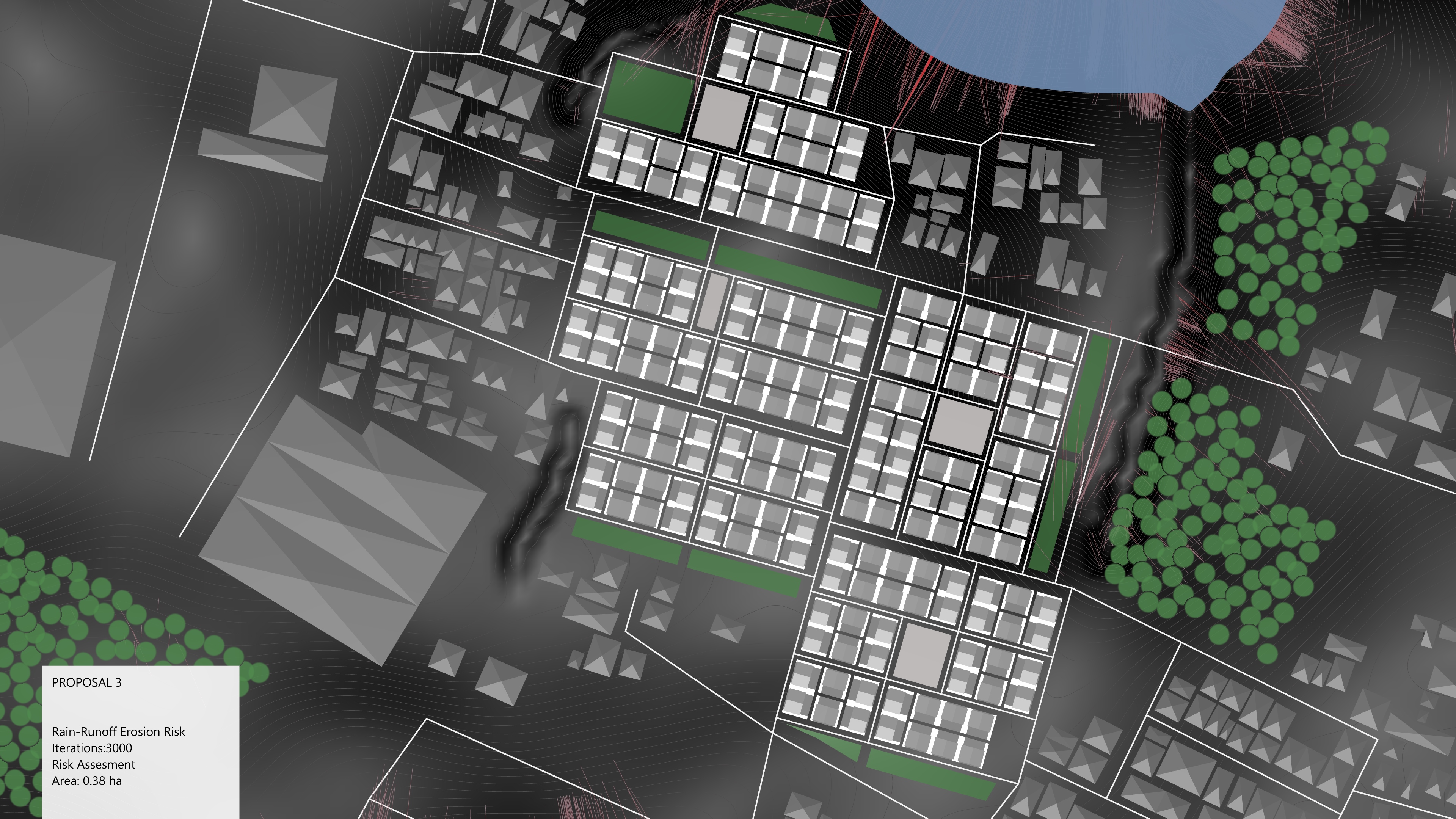
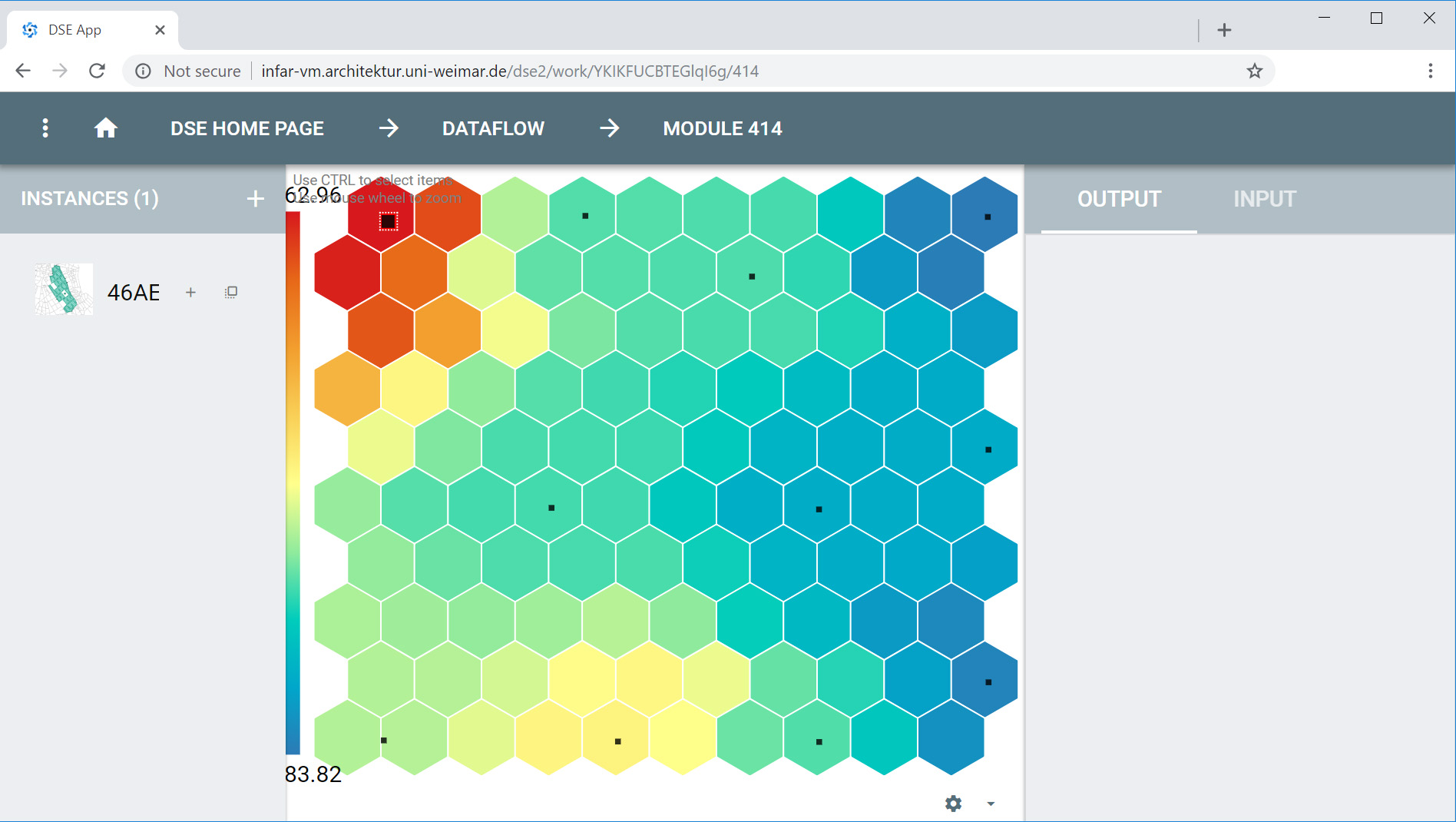
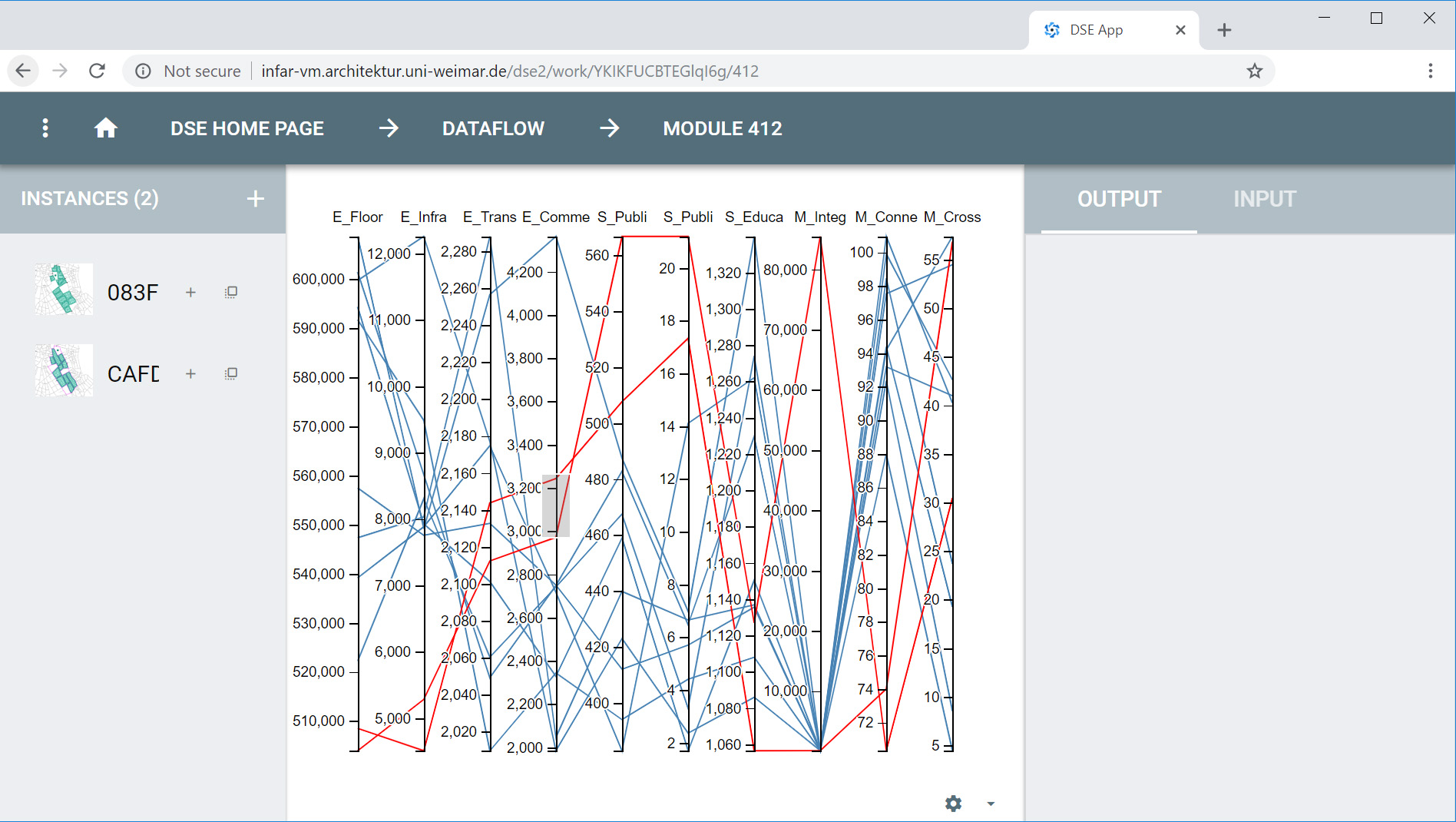
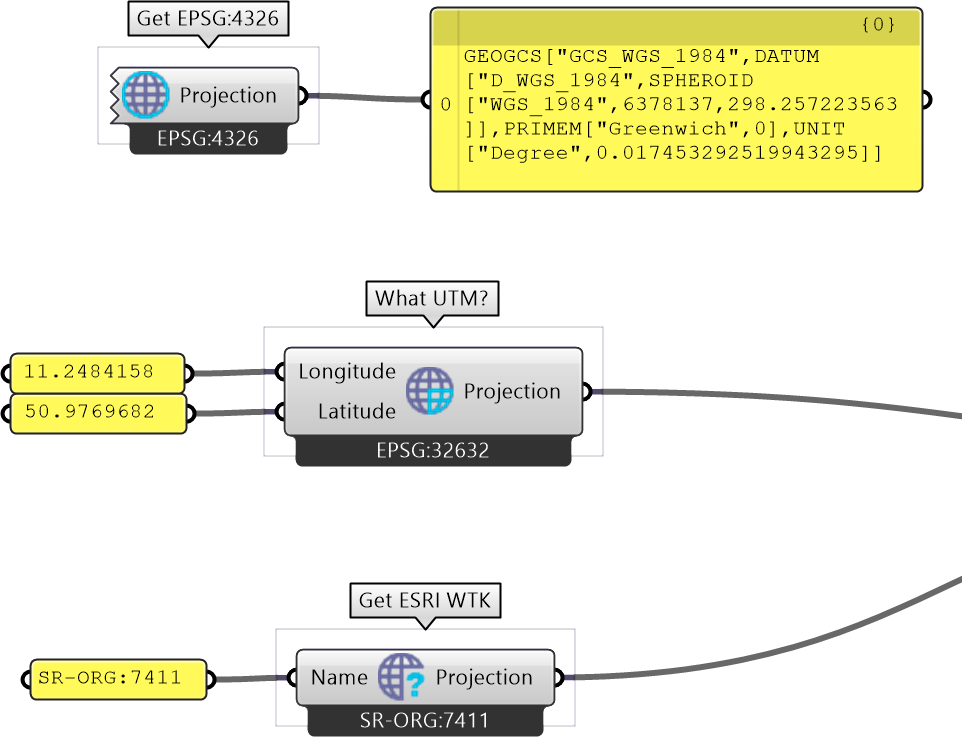
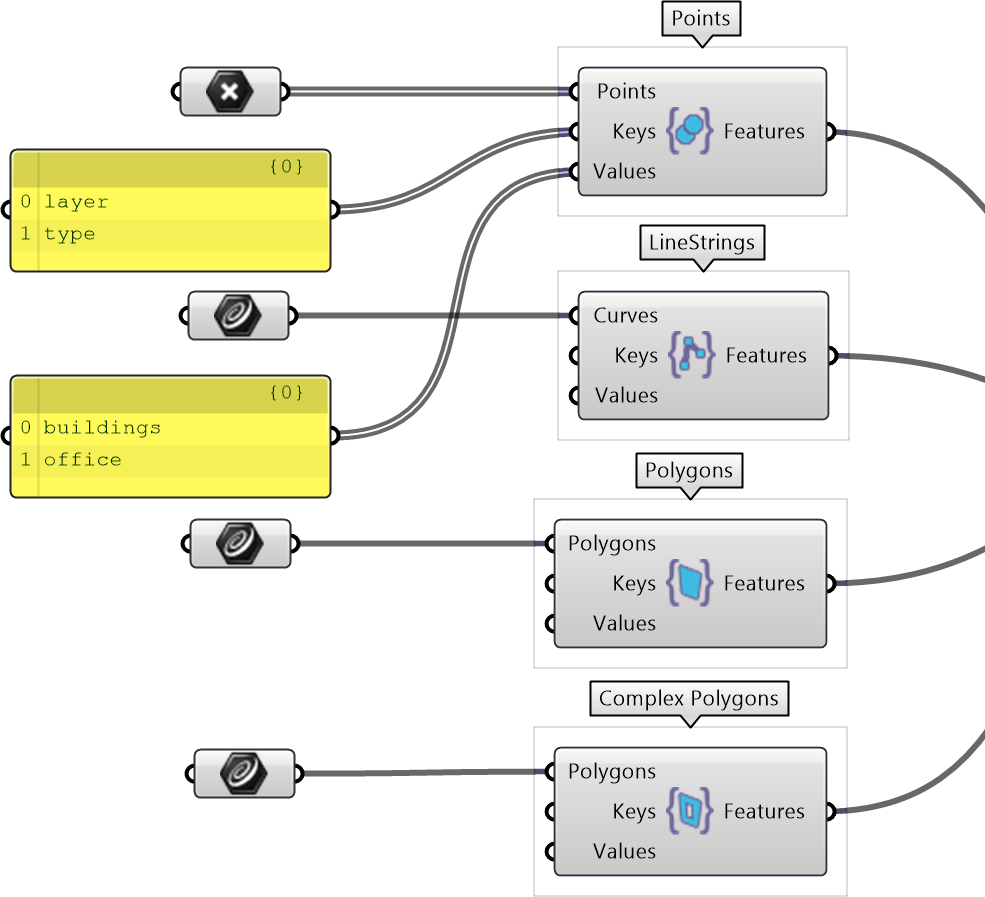
An example of a project exported from Grasshopper using the methods described.
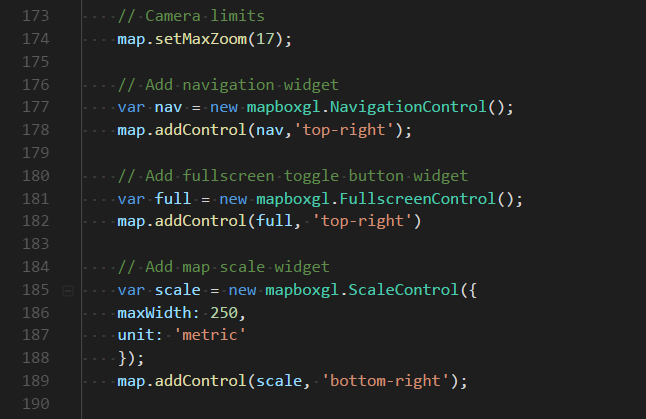
<style><!-- [et_pb_line_break_holder] --> /*-----CSS style for the layer and view selection widget-----*/<!-- [et_pb_line_break_holder] --> #layer-menu {<!-- [et_pb_line_break_holder] --> position: absolute;<!-- [et_pb_line_break_holder] --> z-index: 1;<!-- [et_pb_line_break_holder] --> top: 10px;<!-- [et_pb_line_break_holder] --> left: 10px;<!-- [et_pb_line_break_holder] --> width: 160px;<!-- [et_pb_line_break_holder] --> font-family: 'Open Sans', sans-serif;<!-- [et_pb_line_break_holder] --> }<!-- [et_pb_line_break_holder] --> #camera-menu {<!-- [et_pb_line_break_holder] --> position: absolute;<!-- [et_pb_line_break_holder] --> z-index: 1;<!-- [et_pb_line_break_holder] --> top: 10px;<!-- [et_pb_line_break_holder] --> right: 50px;<!-- [et_pb_line_break_holder] --> width: 80px;<!-- [et_pb_line_break_holder] --> font-family: 'Open Sans', sans-serif;<!-- [et_pb_line_break_holder] --> }<!-- [et_pb_line_break_holder] --> #function-menu {<!-- [et_pb_line_break_holder] --> position: absolute;<!-- [et_pb_line_break_holder] --> z-index: 1;<!-- [et_pb_line_break_holder] --> top: 10px;<!-- [et_pb_line_break_holder] --> right: 140px;<!-- [et_pb_line_break_holder] --> width: 140px;<!-- [et_pb_line_break_holder] --> font-family: 'Open Sans', sans-serif;<!-- [et_pb_line_break_holder] --> }<!-- [et_pb_line_break_holder] --> .dropbtn {<!-- [et_pb_line_break_holder] --> width: 100%;<!-- [et_pb_line_break_holder] --> position: relative;<!-- [et_pb_line_break_holder] --> z-index: 2;<!-- [et_pb_line_break_holder] --> background-color: #31b7bc; /*AIT colors*/;<!-- [et_pb_line_break_holder] --> color: white;<!-- [et_pb_line_break_holder] --> padding: 16px;<!-- [et_pb_line_break_holder] --> font-size: 16px;<!-- [et_pb_line_break_holder] --> border: none;<!-- [et_pb_line_break_holder] --> cursor: pointer;<!-- [et_pb_line_break_holder] --> outline: none;<!-- [et_pb_line_break_holder] --> border-radius: 4px;<!-- [et_pb_line_break_holder] --> box-shadow: 0px 0px 2px 0px rgba(0,0,0,0.5);<!-- [et_pb_line_break_holder] --> font-weight: 500;<!-- [et_pb_line_break_holder] --> }<!-- [et_pb_line_break_holder] --> .dropbtn:hover, .dropbtn:focus {<!-- [et_pb_line_break_holder] --> background-color: #22a1a1;<!-- [et_pb_line_break_holder] --> }<!-- [et_pb_line_break_holder] --> .dropdown-content {<!-- [et_pb_line_break_holder] --> border-radius: 5px;<!-- [et_pb_line_break_holder] --> text-align: left;<!-- [et_pb_line_break_holder] --> display: none;<!-- [et_pb_line_break_holder] --> position: absolute;<!-- [et_pb_line_break_holder] --> top: 55px;<!-- [et_pb_line_break_holder] --> background-color: #ffffff;<!-- [et_pb_line_break_holder] --> width: 100%;<!-- [et_pb_line_break_holder] --> overflow: auto;<!-- [et_pb_line_break_holder] --> box-shadow: 0px 0px 6px 0px rgba(0,0,0,0.4);<!-- [et_pb_line_break_holder] --> z-index: 1;<!-- [et_pb_line_break_holder] --> }<!-- [et_pb_line_break_holder] --> .dropdown-content a {<!-- [et_pb_line_break_holder] --> color: black;<!-- [et_pb_line_break_holder] --> padding: 12px 16px;<!-- [et_pb_line_break_holder] --> text-decoration: none;<!-- [et_pb_line_break_holder] --> display: block;<!-- [et_pb_line_break_holder] --> border-top: 1px solid #ddd;<!-- [et_pb_line_break_holder] --> }<!-- [et_pb_line_break_holder] --> .dropdown-content a.Off {<!-- [et_pb_line_break_holder] --> color: #6b6b6b;<!-- [et_pb_line_break_holder] --> background: #f9f9f9;<!-- [et_pb_line_break_holder] --> }<!-- [et_pb_line_break_holder] --> .dropdown-content a:hover {background-color: rgb(240, 240, 240);}<!-- [et_pb_line_break_holder] --><!-- [et_pb_line_break_holder] --> .show {display: block;} <!-- [et_pb_line_break_holder] --><!-- [et_pb_line_break_holder] --> /*-----CSS style for the element info popup widget-----*/<!-- [et_pb_line_break_holder] --> dd {<!-- [et_pb_line_break_holder] --> margin-left: 0;<!-- [et_pb_line_break_holder] --> margin-bottom: 8px;<!-- [et_pb_line_break_holder] --> font-weight: bold;<!-- [et_pb_line_break_holder] --> }<!-- [et_pb_line_break_holder] --> dt {<!-- [et_pb_line_break_holder] --> color: #31b7bc; /*AIT colors*/<!-- [et_pb_line_break_holder] --> }<!-- [et_pb_line_break_holder] --> dl {<!-- [et_pb_line_break_holder] --> margin-bottom: 0;<!-- [et_pb_line_break_holder] --> }<!-- [et_pb_line_break_holder] --> .mapboxgl-popup-anchor-bottom .mapboxgl-popup-tip{<!-- [et_pb_line_break_holder] --> border-top-color: #31b7bc; /*AIT colors*/<!-- [et_pb_line_break_holder] --> }<!-- [et_pb_line_break_holder] --> .mapboxgl-popup-content{<!-- [et_pb_line_break_holder] --> font-size: 14px;<!-- [et_pb_line_break_holder] --> color: white;<!-- [et_pb_line_break_holder] --> background-color: rgba(0, 0, 0, 0.8);<!-- [et_pb_line_break_holder] --> box-shadow: 0 0 0px 2px #31b7bc; /*AIT colors*/<!-- [et_pb_line_break_holder] --> min-width: 120px;<!-- [et_pb_line_break_holder] --> max-width: 300px;<!-- [et_pb_line_break_holder] --> max-height: 170px;<!-- [et_pb_line_break_holder] --> overflow-y: auto;<!-- [et_pb_line_break_holder] --> }<!-- [et_pb_line_break_holder] --> .mapboxgl-popup-close-button{<!-- [et_pb_line_break_holder] --> color: white;<!-- [et_pb_line_break_holder] --> font-size: 20px;<!-- [et_pb_line_break_holder] --> }<!-- [et_pb_line_break_holder] --><!-- [et_pb_line_break_holder] --> /*-----CSS style for the map scale widget-----*/<!-- [et_pb_line_break_holder] --> .mapboxgl-ctrl-scale {<!-- [et_pb_line_break_holder] --> background-color: rgba(0, 0, 0, 0.75);<!-- [et_pb_line_break_holder] --> font-size: 12px;<!-- [et_pb_line_break_holder] --> border-width: medium 2px 3px;<!-- [et_pb_line_break_holder] --> border-style: none none solid;<!-- [et_pb_line_break_holder] --> border-color: #31b7bc; /*AIT colors*/<!-- [et_pb_line_break_holder] --> padding: 0 5px;<!-- [et_pb_line_break_holder] --> color: white;<!-- [et_pb_line_break_holder] --> box-sizing: border-box;<!-- [et_pb_line_break_holder] --> }<!-- [et_pb_line_break_holder] --><!-- [et_pb_line_break_holder] --> /*-----CSS style for copyright-----*/<!-- [et_pb_line_break_holder] --> #copyright {<!-- [et_pb_line_break_holder] --> font-size: 9px;<!-- [et_pb_line_break_holder] --> color:white;<!-- [et_pb_line_break_holder] --> text-align: center;<!-- [et_pb_line_break_holder] --> }<!-- [et_pb_line_break_holder] --> #copyright a {<!-- [et_pb_line_break_holder] --> color:#31b7bc; /*AIT colors*/<!-- [et_pb_line_break_holder] --> text-decoration: none;<!-- [et_pb_line_break_holder] --> font-weight: 1000;<!-- [et_pb_line_break_holder] --> }<!-- [et_pb_line_break_holder] --> </style><!-- [et_pb_line_break_holder] --><!-- [et_pb_line_break_holder] --> <div id='map' style='min-height: 500px; min-width: 460px;'> <!-- MapBox container --><!-- [et_pb_line_break_holder] --> <nav id="layer-menu"><!-- [et_pb_line_break_holder] --> <button onclick="dropdownToggle('layerDropdown')" class="dropbtn"><!-- [et_pb_line_break_holder] --> Select scenario</button><!-- [et_pb_line_break_holder] --> <div id="layerDropdown" class="dropdown-content"></div><!-- [et_pb_line_break_holder] --> <div id = "copyright">created at <a target="_blank" <!-- [et_pb_line_break_holder] --> href="https://cities.ait.ac.at/site/">AIT</a><!-- [et_pb_line_break_holder] --> by Ondrej Vesely, 2018</div><!-- [et_pb_line_break_holder] --> </nav><!-- [et_pb_line_break_holder] --> <nav id="camera-menu"><!-- [et_pb_line_break_holder] --> <button onclick="dropdownToggle('cameraDropdown')" class="dropbtn"><!-- [et_pb_line_break_holder] --> Views</button><!-- [et_pb_line_break_holder] --> <div id="cameraDropdown" class="dropdown-content"></div><!-- [et_pb_line_break_holder] --> </nav><!-- [et_pb_line_break_holder] --> <nav id="function-menu"><!-- [et_pb_line_break_holder] --> <button onclick="dropdownToggle('functionDropdown')" class="dropbtn"><!-- [et_pb_line_break_holder] --> Functions</button><!-- [et_pb_line_break_holder] --> <div id="functionDropdown" class="dropdown-content"></div><!-- [et_pb_line_break_holder] --> </nav><!-- [et_pb_line_break_holder] --> </div><!-- [et_pb_line_break_holder] --><!-- [et_pb_line_break_holder] --> <script><!-- [et_pb_line_break_holder] --><!-- [et_pb_line_break_holder] --> // Load Map via Mapbox API<!-- [et_pb_line_break_holder] --> mapboxgl.accessToken = 'pk.eyJ1Ijoib25kcmVqLXZlc2VseSIsImEiOiJjamlhOWo3cnkwMnY3M3ZwZjU5bm54c3BsIn0.69pwP4aK4CmFBlpU8I4giw';<!-- [et_pb_line_break_holder] --> // dont forget to change this accessToken to you own if you use this code<!-- [et_pb_line_break_holder] --> var map = new mapboxgl.Map({<!-- [et_pb_line_break_holder] --> container: 'map',<!-- [et_pb_line_break_holder] --> style: 'mapbox://styles/ondrej-vesely/cjjsritez0dx42ro0vz8l2ks4'<!-- [et_pb_line_break_holder] --> });<!-- [et_pb_line_break_holder] --><!-- [et_pb_line_break_holder] --> // Camera limits<!-- [et_pb_line_break_holder] --> map.setMaxZoom(17);<!-- [et_pb_line_break_holder] --><!-- [et_pb_line_break_holder] --> // Add navigation widget<!-- [et_pb_line_break_holder] --> var nav = new mapboxgl.NavigationControl();<!-- [et_pb_line_break_holder] --> map.addControl(nav,'top-right');<!-- [et_pb_line_break_holder] --><!-- [et_pb_line_break_holder] --> // Add fullscreen toggle button widget<!-- [et_pb_line_break_holder] --> var full = new mapboxgl.FullscreenControl();<!-- [et_pb_line_break_holder] --> map.addControl(full, 'top-right')<!-- [et_pb_line_break_holder] --><!-- [et_pb_line_break_holder] --> // Add map scale widget<!-- [et_pb_line_break_holder] --> var scale = new mapboxgl.ScaleControl({<!-- [et_pb_line_break_holder] --> maxWidth: 250,<!-- [et_pb_line_break_holder] --> unit: 'metric'<!-- [et_pb_line_break_holder] --> });<!-- [et_pb_line_break_holder] --> map.addControl(scale, 'bottom-right');<!-- [et_pb_line_break_holder] --><!-- [et_pb_line_break_holder] --> // On start wait till map loads,<!-- [et_pb_line_break_holder] --> map.on('load', function() {<!-- [et_pb_line_break_holder] --> // move camera a bit,<!-- [et_pb_line_break_holder] --> map.flyTo({center: [103.84, 1.2680], zoom: 13.8, speed: 0.1, bearing: 4})<!-- [et_pb_line_break_holder] --> // and open welcome popup<!-- [et_pb_line_break_holder] --> helpPopup()<!-- [et_pb_line_break_holder] --> });<!-- [et_pb_line_break_holder] --> <!-- [et_pb_line_break_holder] --><!-- [et_pb_line_break_holder] --> // --- The interesting stuff starts here ----<!-- [et_pb_line_break_holder] --><!-- [et_pb_line_break_holder] --> // Dropdowns<!-- [et_pb_line_break_holder] --> // When the user clicks on the button, <!-- [et_pb_line_break_holder] --> // toggle between hiding and showing the dropdown content<!-- [et_pb_line_break_holder] --> function dropdownToggle(id) {<!-- [et_pb_line_break_holder] --> document.getElementById(id).classList.toggle("show");<!-- [et_pb_line_break_holder] --> }<!-- [et_pb_line_break_holder] --> // Layers which include multiple variants and should filtered based on displayed scenario<!-- [et_pb_line_break_holder] --> var scenLayers = [<!-- [et_pb_line_break_holder] --> 'land', 'land2', 'buildings', 'streets', 'trees', 'bridges', 'floors', 'syntax',<!-- [et_pb_line_break_holder] --> 'solar'<!-- [et_pb_line_break_holder] --> ]<!-- [et_pb_line_break_holder] --><!-- [et_pb_line_break_holder] --> // List of variants included in the data<!-- [et_pb_line_break_holder] --> var scenNames = ['scen1', 'scen3', 'scen5']<!-- [et_pb_line_break_holder] --> var scenNiceNames = ['Green Loop City', 'Garden City', 'Oceanfront']<!-- [et_pb_line_break_holder] --><!-- [et_pb_line_break_holder] --> // Add scenario names to dropdown to chenge scenario filter on click<!-- [et_pb_line_break_holder] --> for (var i = 0; i < scenNames.length; i++) {<!-- [et_pb_line_break_holder] --> var id = scenNames[i];<!-- [et_pb_line_break_holder] --> var name = scenNiceNames[i];<!-- [et_pb_line_break_holder] --> var link = document.createElement('a');<!-- [et_pb_line_break_holder] --> link.href = 'javascript:changeScen("' + id + '")';<!-- [et_pb_line_break_holder] --> link.textContent = name;<!-- [et_pb_line_break_holder] --> var $layerDropdown = document.getElementById('layerDropdown');<!-- [et_pb_line_break_holder] --> $layerDropdown.appendChild(link);<!-- [et_pb_line_break_holder] --> }<!-- [et_pb_line_break_holder] --> // Scenario change - Loops trough list of scenario layers,<!-- [et_pb_line_break_holder] --> // sets variant filter to given scenario name<!-- [et_pb_line_break_holder] --> function changeScen(id) {<!-- [et_pb_line_break_holder] --> for (var i = 0; i < scenLayers.length; i++) {<!-- [et_pb_line_break_holder] --> var layer = scenLayers[i];<!-- [et_pb_line_break_holder] --> filter = map.getFilter(layer); // gets current filter settings<!-- [et_pb_line_break_holder] --> for (var j = 0; j < filter.length; j++) {<!-- [et_pb_line_break_holder] --> if (filter[j][1] == "var") { // Key under which you specify variants<!-- [et_pb_line_break_holder] --> filter[j][2] = id; // change the Value to "id" (scenario name)<!-- [et_pb_line_break_holder] --> }<!-- [et_pb_line_break_holder] --> }<!-- [et_pb_line_break_holder] --> map.setFilter(layer, filter);<!-- [et_pb_line_break_holder] --> }<!-- [et_pb_line_break_holder] --> }<!-- [et_pb_line_break_holder] --><!-- [et_pb_line_break_holder] --> // For the cameras you want to save, put its position as CameraOptions here<!-- [et_pb_line_break_holder] --> var cameras = [<!-- [et_pb_line_break_holder] --> {center: [103.836607, 1.272156], zoom: 17, bearing: 136, pitch: 60}, <!-- [et_pb_line_break_holder] --> {center: [103.846564, 1.272998], zoom: 16, bearing: -180, pitch: 60}, <!-- [et_pb_line_break_holder] --> {center: [103.832839, 1.259721], zoom: 15, bearing: 0, pitch: 0}];<!-- [et_pb_line_break_holder] --> var cameraNames = ['Station', 'CBD', 'Island']<!-- [et_pb_line_break_holder] --><!-- [et_pb_line_break_holder] --> // Add views to camera dropdown to switch cameras on click<!-- [et_pb_line_break_holder] --> for (var i = 0; i < cameras.length; i++) {<!-- [et_pb_line_break_holder] --> var name = cameraNames[i]<!-- [et_pb_line_break_holder] --> var link = document.createElement('a');<!-- [et_pb_line_break_holder] --> link.href = 'javascript:changeCamera(cameras[' + i + '])';<!-- [et_pb_line_break_holder] --> link.textContent = name;<!-- [et_pb_line_break_holder] --> var $cameraDropdown = document.getElementById('cameraDropdown');<!-- [et_pb_line_break_holder] --> $cameraDropdown.appendChild(link);<!-- [et_pb_line_break_holder] --> }<!-- [et_pb_line_break_holder] --> // View switching<!-- [et_pb_line_break_holder] --> function changeCamera(cameraOptions){<!-- [et_pb_line_break_holder] --> // You can set camera fly speed here<!-- [et_pb_line_break_holder] --> cameraOptions['speed'] = '0.5';<!-- [et_pb_line_break_holder] --> map.flyTo(cameraOptions);<!-- [et_pb_line_break_holder] --> }<!-- [et_pb_line_break_holder] --><!-- [et_pb_line_break_holder] --> <!-- [et_pb_line_break_holder] --> // List of additional functions you want to include as tools<!-- [et_pb_line_break_holder] --> var functions = [<!-- [et_pb_line_break_holder] --> 'toggle3d()', 'toggleFloors()', 'toggleSun()',<!-- [et_pb_line_break_holder] --> 'toggleSyntax()', 'issues()', 'helpPopup()'<!-- [et_pb_line_break_holder] --> ]<!-- [et_pb_line_break_holder] --> var functionNames = [<!-- [et_pb_line_break_holder] --> '☑ 3D buildings', '☐ Higher LOD', '☐ Shadow study',<!-- [et_pb_line_break_holder] --> '☐ SpaceSyntax', '☐ Comments', 'Need Help?'<!-- [et_pb_line_break_holder] --> ]<!-- [et_pb_line_break_holder] --> var startToggle = ['On', 'Off', 'Off', 'Off', 'Off', 'On']<!-- [et_pb_line_break_holder] --> // Add functions to dropdown to switch activate on click<!-- [et_pb_line_break_holder] --> for (var i = 0; i < functions.length; i++) {<!-- [et_pb_line_break_holder] --> var id = functions[i];<!-- [et_pb_line_break_holder] --> var name = functionNames[i];<!-- [et_pb_line_break_holder] --> var toggle = startToggle[i]<!-- [et_pb_line_break_holder] --> var link = document.createElement('a');<!-- [et_pb_line_break_holder] --> link.href = 'javascript:' + id<!-- [et_pb_line_break_holder] --> link.textContent = name;<!-- [et_pb_line_break_holder] --> link.id = id<!-- [et_pb_line_break_holder] --> link.classList = toggle<!-- [et_pb_line_break_holder] --> var $layerDropdown = document.getElementById('functionDropdown');<!-- [et_pb_line_break_holder] --> $layerDropdown.appendChild(link);<!-- [et_pb_line_break_holder] --> }<!-- [et_pb_line_break_holder] --> <!-- [et_pb_line_break_holder] --> // 3D buildings toggle<!-- [et_pb_line_break_holder] --> var extrusionHeight = []<!-- [et_pb_line_break_holder] --> map.on("load", function(){<!-- [et_pb_line_break_holder] --> extrusionHeight = map.getPaintProperty("buildings", "fill-extrusion-height")<!-- [et_pb_line_break_holder] --> })<!-- [et_pb_line_break_holder] --> function toggle3d(){<!-- [et_pb_line_break_holder] --> if(document.getElementById("toggle3d()").classList == "On") {<!-- [et_pb_line_break_holder] --> map.setPaintProperty("buildings", "fill-extrusion-height", 8)<!-- [et_pb_line_break_holder] --> map.setPaintProperty('floors', "fill-extrusion-opacity", 0);<!-- [et_pb_line_break_holder] --> document.getElementById("toggle3d()").textContent = "☐ 3D buildings"<!-- [et_pb_line_break_holder] --> document.getElementById("toggle3d()").classList = "Off"<!-- [et_pb_line_break_holder] --> }<!-- [et_pb_line_break_holder] --> else if(document.getElementById("toggle3d()").classList == "Off") {<!-- [et_pb_line_break_holder] --> map.setPaintProperty("buildings", "fill-extrusion-height", extrusionHeight)<!-- [et_pb_line_break_holder] --> map.setPaintProperty('floors', "fill-extrusion-opacity", 1);<!-- [et_pb_line_break_holder] --> document.getElementById("toggle3d()").textContent = "☑ 3D buildings"<!-- [et_pb_line_break_holder] --> document.getElementById("toggle3d()").classList = "On"<!-- [et_pb_line_break_holder] --> }<!-- [et_pb_line_break_holder] --> }<!-- [et_pb_line_break_holder] --><!-- [et_pb_line_break_holder] --> // Higher LOD -- Floors toggle<!-- [et_pb_line_break_holder] --> function toggleFloors() {<!-- [et_pb_line_break_holder] --> if(document.getElementById("toggleFloors()").classList == "Off") {<!-- [et_pb_line_break_holder] --> // First check if map isnt zoomed out too far<!-- [et_pb_line_break_holder] --> // If map is far, zoom slowly to proper zoom level<!-- [et_pb_line_break_holder] --> if(map.getZoom() < 15) {<!-- [et_pb_line_break_holder] --> map.flyTo({zoom: 15, speed: 0.5})<!-- [et_pb_line_break_holder] --> }<!-- [et_pb_line_break_holder] --> else {<!-- [et_pb_line_break_holder] --> map.flyTo({zoom: map.getZoom()+0.0001})<!-- [et_pb_line_break_holder] --> }<!-- [et_pb_line_break_holder] --> map.once('zoomend', function() {<!-- [et_pb_line_break_holder] --> map.setMinZoom(15)<!-- [et_pb_line_break_holder] --> map.setPaintProperty("buildings", "fill-extrusion-opacity", 0)<!-- [et_pb_line_break_holder] --> map.setLayoutProperty('floors', 'visibility', 'visible');<!-- [et_pb_line_break_holder] --> document.getElementById("toggleFloors()").textContent = "☑ Higher LOD"<!-- [et_pb_line_break_holder] --> document.getElementById("toggleFloors()").classList = "On"<!-- [et_pb_line_break_holder] --> })<!-- [et_pb_line_break_holder] --> }<!-- [et_pb_line_break_holder] --> else if(document.getElementById("toggleFloors()").classList == "On") {<!-- [et_pb_line_break_holder] --> map.setLayoutProperty('floors', 'visibility', 'none');<!-- [et_pb_line_break_holder] --> map.setPaintProperty("buildings", "fill-extrusion-opacity", 1)<!-- [et_pb_line_break_holder] --> document.getElementById("toggleFloors()").textContent = "☐ Higher LOD"<!-- [et_pb_line_break_holder] --> document.getElementById("toggleFloors()").classList = "Off"<!-- [et_pb_line_break_holder] --> map.setMinZoom(0)<!-- [et_pb_line_break_holder] --> }<!-- [et_pb_line_break_holder] --> }<!-- [et_pb_line_break_holder] --> // Toggle Sun hours / Shadowstudy<!-- [et_pb_line_break_holder] --> function toggleSun(){<!-- [et_pb_line_break_holder] --> if(document.getElementById("toggleSun()").classList == "Off") {<!-- [et_pb_line_break_holder] --> map.setLayoutProperty('solar', "visibility", "visible");<!-- [et_pb_line_break_holder] --> document.getElementById("toggleSun()").textContent = "☑ Shadow study"<!-- [et_pb_line_break_holder] --> document.getElementById("toggleSun()").classList = "On"<!-- [et_pb_line_break_holder] --> <!-- [et_pb_line_break_holder] --> var popup = new mapboxgl.Popup({closeButton: false, closeOnClick: false})<!-- [et_pb_line_break_holder] --> map.on('mousemove', 'solar', function(e) {<!-- [et_pb_line_break_holder] --> map.getCanvas().style.cursor = 'help';<!-- [et_pb_line_break_holder] --> popup.remove(map)<!-- [et_pb_line_break_holder] --> var features = map.queryRenderedFeatures(e.point, {layers: ["solar"]});<!-- [et_pb_line_break_holder] --> var face = features[0];<!-- [et_pb_line_break_holder] --> var hours = face.properties.hours<!-- [et_pb_line_break_holder] --> popup.setLngLat(e.lngLat)<!-- [et_pb_line_break_holder] --> .setHTML(<!-- [et_pb_line_break_holder] --> '<dd>' + hours + ' hours</dd>' +<!-- [et_pb_line_break_holder] --> '<dt> of sunlight <br>on 1st of August.</dt>'<!-- [et_pb_line_break_holder] --> )<!-- [et_pb_line_break_holder] --> .addTo(map);<!-- [et_pb_line_break_holder] --> })<!-- [et_pb_line_break_holder] --> map.on('mouseleave', 'solar', function(){<!-- [et_pb_line_break_holder] --> map.getCanvas().style.cursor = '';<!-- [et_pb_line_break_holder] --> popup.remove(map);<!-- [et_pb_line_break_holder] --> })<!-- [et_pb_line_break_holder] --> }<!-- [et_pb_line_break_holder] --> else if(document.getElementById("toggleSun()").classList == "On") {<!-- [et_pb_line_break_holder] --> map.setLayoutProperty('solar', "visibility", "none");<!-- [et_pb_line_break_holder] --> document.getElementById("toggleSun()").textContent = "☐ Shadow study"<!-- [et_pb_line_break_holder] --> document.getElementById("toggleSun()").classList = "Off"<!-- [et_pb_line_break_holder] --> }<!-- [et_pb_line_break_holder] --> }<!-- [et_pb_line_break_holder] --><!-- [et_pb_line_break_holder] --> // Toggle SpaceSyntax<!-- [et_pb_line_break_holder] --> function toggleSyntax(){<!-- [et_pb_line_break_holder] --> if(document.getElementById("toggleSyntax()").classList == "Off") {<!-- [et_pb_line_break_holder] --> map.setPaintProperty('syntax', "line-opacity", 1);<!-- [et_pb_line_break_holder] --> document.getElementById("toggleSyntax()").textContent = "☑ SpaceSyntax"<!-- [et_pb_line_break_holder] --> document.getElementById("toggleSyntax()").classList = "On"<!-- [et_pb_line_break_holder] --> }<!-- [et_pb_line_break_holder] --> else if(document.getElementById("toggleSyntax()").classList == "On") {<!-- [et_pb_line_break_holder] --> map.setPaintProperty('syntax', "line-opacity", 0);<!-- [et_pb_line_break_holder] --> document.getElementById("toggleSyntax()").textContent = "☐ SpaceSyntax"<!-- [et_pb_line_break_holder] --> document.getElementById("toggleSyntax()").classList = "Off"<!-- [et_pb_line_break_holder] --> }<!-- [et_pb_line_break_holder] --> }<!-- [et_pb_line_break_holder] --><!-- [et_pb_line_break_holder] --> // Feedback toggle<!-- [et_pb_line_break_holder] --> // Switch between icons visible and hidden<!-- [et_pb_line_break_holder] --> function issues() {<!-- [et_pb_line_break_holder] --> if(document.getElementById("issues()").classList == "Off") {<!-- [et_pb_line_break_holder] --> map.setLayoutProperty("wtp-comments", 'visibility', 'visible');<!-- [et_pb_line_break_holder] --> document.getElementById("issues()").textContent = "☑ Comments"<!-- [et_pb_line_break_holder] --> document.getElementById("issues()").classList = "On"<!-- [et_pb_line_break_holder] --> }<!-- [et_pb_line_break_holder] --> else if(document.getElementById("issues()").classList == "On") {<!-- [et_pb_line_break_holder] --> map.setLayoutProperty("wtp-comments", 'visibility', 'none');<!-- [et_pb_line_break_holder] --> document.getElementById("issues()").textContent = "☐ Comments"<!-- [et_pb_line_break_holder] --> document.getElementById("issues()").classList = "Off"<!-- [et_pb_line_break_holder] --> }<!-- [et_pb_line_break_holder] --> }<!-- [et_pb_line_break_holder] --> // on hover open popup with text info<!-- [et_pb_line_break_holder] --> issuePopup = new mapboxgl.Popup({closeButton: false, closeOnClick: false})<!-- [et_pb_line_break_holder] --> map.on('mouseenter', 'wtp-comments', function(e) {<!-- [et_pb_line_break_holder] --> map.getCanvas().style.cursor = 'pointer';<!-- [et_pb_line_break_holder] --> var coordinates = e.features[0].geometry.coordinates.slice();<!-- [et_pb_line_break_holder] --> var text = e.features[0].properties.text;<!-- [et_pb_line_break_holder] --> var author = e.features[0].properties.author;<!-- [et_pb_line_break_holder] --> issuePopup.setLngLat(coordinates)<!-- [et_pb_line_break_holder] --> .setHTML('<dt>' + text + '</dt>' +<!-- [et_pb_line_break_holder] --> '<br><dd>' + author + '</dd>'<!-- [et_pb_line_break_holder] --> )<!-- [et_pb_line_break_holder] --> .addTo(map);<!-- [et_pb_line_break_holder] --> })<!-- [et_pb_line_break_holder] --> // close it on hover end<!-- [et_pb_line_break_holder] --> map.on('mouseleave', 'wtp-comments', function() {<!-- [et_pb_line_break_holder] --> map.getCanvas().style.cursor = '';<!-- [et_pb_line_break_holder] --> issuePopup.remove();<!-- [et_pb_line_break_holder] --> })<!-- [et_pb_line_break_holder] --><!-- [et_pb_line_break_holder] --><!-- [et_pb_line_break_holder] --> // +++ Other useful functions<!-- [et_pb_line_break_holder] --><!-- [et_pb_line_break_holder] --> // Help popup with controls info<!-- [et_pb_line_break_holder] --> function helpPopup() {<!-- [et_pb_line_break_holder] --> window.popup = new mapboxgl.Popup()<!-- [et_pb_line_break_holder] --> .setLngLat(map.getCenter())<!-- [et_pb_line_break_holder] --> .setHTML( //OLD IE COMPATABLE MUTLILINE STRING<!-- [et_pb_line_break_holder] --> '<dd>How can you explore the model?</dd>' +<!-- [et_pb_line_break_holder] --> '<dt>Click on "Select scenario" to choose between different variants' +<!-- [et_pb_line_break_holder] --> ' or click on buildings to display more information about them.</dt>' +<!-- [et_pb_line_break_holder] --> '<dt><br>To control the camera press Control + Left Mouse Button or use' +<!-- [et_pb_line_break_holder] --> ' one of the preset positions with "Views" menu.</dt>' +<!-- [et_pb_line_break_holder] --> '<dt><br>In the "Functions" menu you can hide the 3D geometry' +<!-- [et_pb_line_break_holder] --> ' and change the Level of Detail or show a demo of feedback system.</dt>'<!-- [et_pb_line_break_holder] --> )<!-- [et_pb_line_break_holder] --> .addTo(map);<!-- [et_pb_line_break_holder] --> }<!-- [et_pb_line_break_holder] --><!-- [et_pb_line_break_holder] --> // Layer with additional data popup on click<!-- [et_pb_line_break_holder] --> activeLayer = 'buildings'<!-- [et_pb_line_break_holder] --> // change the cursor when hovering over this layer<!-- [et_pb_line_break_holder] --> map.on('mouseenter', activeLayer, function(event) {<!-- [et_pb_line_break_holder] --> map.getCanvas().style.cursor = 'help';<!-- [et_pb_line_break_holder] --> }); <!-- [et_pb_line_break_holder] --> map.on('mouseleave', activeLayer, function() {<!-- [et_pb_line_break_holder] --> map.getCanvas().style.cursor = '';<!-- [et_pb_line_break_holder] --> });<!-- [et_pb_line_break_holder] --> // Open popup with GeoJson properties on click<!-- [et_pb_line_break_holder] --> map.on('click', function(event) {<!-- [et_pb_line_break_holder] --> var features = map.queryRenderedFeatures(event.point, {layers: [activeLayer]});<!-- [et_pb_line_break_holder] --> var building = features[0];<!-- [et_pb_line_break_holder] --> <!-- [et_pb_line_break_holder] --> // Keys you want to include<!-- [et_pb_line_break_holder] --> if (features.length) {<!-- [et_pb_line_break_holder] --> var landUse = building.properties.function <!-- [et_pb_line_break_holder] --> '–';<!-- [et_pb_line_break_holder] --> var height = Math.round(building.properties.height) <!-- [et_pb_line_break_holder] --> '–';<!-- [et_pb_line_break_holder] --> var gfa = Math.round(building.properties.GFA) <!-- [et_pb_line_break_holder] --> '–';<!-- [et_pb_line_break_holder] --> var id = building.properties.build_ID <!-- [et_pb_line_break_holder] --> '–';<!-- [et_pb_line_break_holder] --> <!-- [et_pb_line_break_holder] --> // HTML content of the popup<!-- [et_pb_line_break_holder] --> window.popup = new mapboxgl.Popup()<!-- [et_pb_line_break_holder] --> .setLngLat(event.lngLat)<!-- [et_pb_line_break_holder] --> .setHTML( <!-- [et_pb_line_break_holder] --> '<dl>' +<!-- [et_pb_line_break_holder] --> // '<dt>Land Use</dt>' +<!-- [et_pb_line_break_holder] --> // '<dd>' + landUse + '</dd>' +<!-- [et_pb_line_break_holder] --> '<dt>Building Height</dt>' +<!-- [et_pb_line_break_holder] --> '<dd>' + height + ' m' + '</dd>' +<!-- [et_pb_line_break_holder] --> '<dt>GFA</dt>' +<!-- [et_pb_line_break_holder] --> '<dd>' + gfa + ' sqm' + '</dd>' +<!-- [et_pb_line_break_holder] --> '<dt>ID#</dt>' +<!-- [et_pb_line_break_holder] --> '<dd>' + id + '</dd>' +<!-- [et_pb_line_break_holder] --> '</dl>') //OLD IE COMPATABLE MUTLILINE STRING FORMAT<!-- [et_pb_line_break_holder] --> .addTo(map);<!-- [et_pb_line_break_holder] --> };<!-- [et_pb_line_break_holder] --> });<!-- [et_pb_line_break_holder] --><!-- [et_pb_line_break_holder] --><!-- [et_pb_line_break_holder] --> </script>















































{kind=link}